




Kā transmisijas mehānisms planetārais zobrats tiek plaši izmantots dažādās inženiertehniskās praksēs, piemēram, zobratu reduktoros, celtņos, planetāro zobratu reduktoros utt. Planētu zobratu reduktors daudzos gadījumos var aizstāt fiksētas ass zobratu pārvades mehānismu. Tā kā zobratu pārvades process ir līnijas kontakts, ilgstoša sazobe izraisīs zobrata atteici, tāpēc ir nepieciešams simulēt tā izturību. Li Hongli un līdzautori izmantoja automātisko sazobes metodi, lai sazobinātu planetāro zobratu, un ieguva, ka griezes moments un maksimālais spriegums ir lineāri. Vans Jaņdzjuns un līdzautori arī sazoboja planetāro zobratu, izmantojot automātiskās ģenerēšanas metodi, un simulēja planetārā zobrata statisko un modālo simulāciju. Šajā rakstā tetraedru un heksaedru elementi galvenokārt tiek izmantoti sieta sadalīšanai, un gala rezultāti tiek analizēti, lai redzētu, vai ir izpildīti izturības nosacījumi.
1. Modeļa izveide un rezultātu analīze
Planētu pārnesumu trīsdimensiju modelēšana
Planētu pārnesumsgalvenokārt sastāv no gredzenveida zobrata, saules zobrata un planētu zobrata. Šajā darbā izvēlētie galvenie parametri ir: iekšējā zobrata gredzena zobu skaits ir 66, saules zobrata zobu skaits ir 36, planētu zobrata zobu skaits ir 15, iekšējā zobrata gredzena ārējais diametrs ir 150 mm, modulis ir 2 mm, spiediena leņķis ir 20°, zoba platums ir 20 mm, papildinājuma augstuma koeficients ir 1, brīvkustības koeficients ir 0,25 un ir trīs planētu zobrati.
Planētu pārnesumu statiskās simulācijas analīze
Definējiet materiāla īpašības: importējiet UG programmatūrā uzzīmēto trīsdimensiju planetāro pārnesumu sistēmu ANSYS programmā un iestatiet materiāla parametrus, kā parādīts 1. tabulā zemāk:

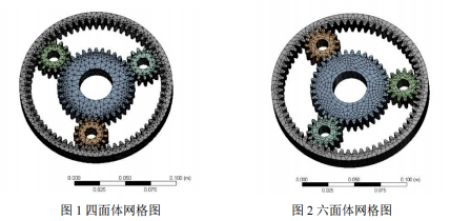
Tīkls: Galīgo elementu tīkls ir sadalīts tetraedros un heksaedros, un elementa pamata izmērs ir 5 mm. Tā kāplanetārais pārnesumsSaules zobrats un iekšējais zobrata gredzens saskaras un ir savienoti, kontakta un sieta daļu siets ir sablīvēts, un izmērs ir 2 mm. Vispirms tiek izmantoti tetraedriski režģi, kā parādīts 1. attēlā. Kopumā tiek ģenerēti 105906 elementi un 177893 mezgli. Pēc tam tiek pieņemts heksaedrisks režģis, kā parādīts 2. attēlā, un kopumā tiek ģenerēti 26957 šūnas un 140560 mezgli.
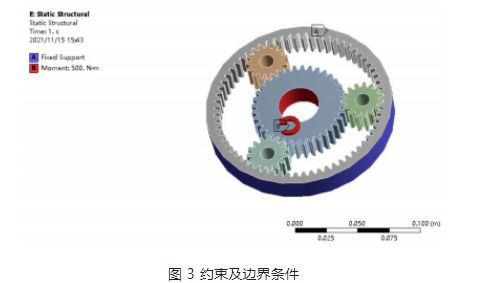
Slodzes pielietojums un robežnosacījumi: saskaņā ar reduktora planetārā zobrata darba raksturlielumiem saules zobrats ir piedziņas zobrats, planētas zobrats ir piedziņas zobrats, un galīgā izeja notiek caur planētas nesēju. Nostipriniet iekšējo zobrata gredzenu ANSYS sistēmā un pielieciet saules zobratam 500 N · m griezes momentu, kā parādīts 3. attēlā.
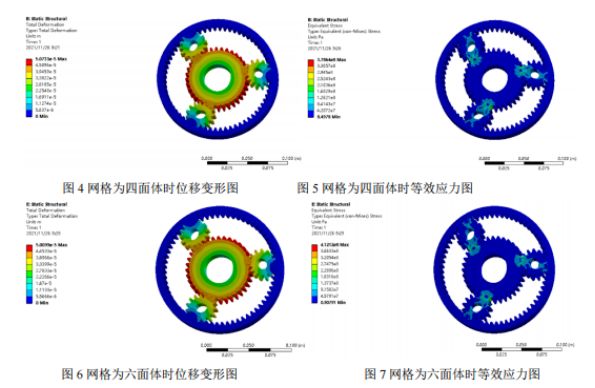
Pēcapstrāde un rezultātu analīze: Zemāk ir sniegta statiskās analīzes pārvietojuma nefogramma un ekvivalenta sprieguma nefogramma, kas iegūta no diviem režģa sadalījumiem, un veikta salīdzinošā analīze. No abu veidu režģu pārvietojuma nefogrammas ir konstatēts, ka maksimālā pārvietojuma vērtība rodas pozīcijā, kur saules zobrats nesavienojas ar planētu zobratu, un maksimālais spriegums rodas zobrata režģa saknē. Tetraedriskā režģa maksimālais spriegums ir 378 MPa, bet heksaedriskā režģa maksimālais spriegums ir 412 MPa. Tā kā materiāla tecēšanas robeža ir 785 MPa un drošības koeficients ir 1,5, pieļaujamais spriegums ir 523 MPa. Abu rezultātu maksimālais spriegums ir mazāks par pieļaujamo spriegumu, un abi atbilst stiprības nosacījumiem.
2. Secinājums
Izmantojot planētu pārnesuma galīgo elementu simulāciju, tiek iegūta pārnesumu sistēmas pārvietojuma deformācijas nefogramma un ekvivalentā sprieguma nefogramma, no kuras tiek iegūti maksimālie un minimālie dati un to sadalījumsplanetārais pārnesumsmodeli var atrast. Maksimālā ekvivalentā sprieguma vieta ir arī vieta, kur zobratu zobi, visticamāk, sabojāsies, tāpēc tai jāpievērš īpaša uzmanība projektēšanas vai ražošanas laikā. Analizējot visu planētu zobratu sistēmu, tiek novērsta kļūda, ko rada tikai viena zobrata analīze.
Publicēšanas laiks: 2022. gada 28. decembris